
Mentor on a Mission
I enjoy making things move with computers. Robotics is a great entry point into a fun and interesting world.
There are a lot of students who are curious and would like to learn more and get started with basic skills, or have played with Lego Mindstorm and want to learn enough to be a useful member of First Robotic Competition team in full build season. This mentor is on a mission to help those kids get started and help them go as far as they are determined to go.

My name is Charlie Peppler. I have always had a passion for using computers to move things and make things. I've spent most of my career in connecting computers, devices, databases, and of course people. More on my background and why I started doing this later, but the first question is: What the heck is a "Mentor on a Mission"? I volunteered as a mentor for First Robotics Competition (Team 5459 - Ipswich MA). I enjoyed the experience, but after…
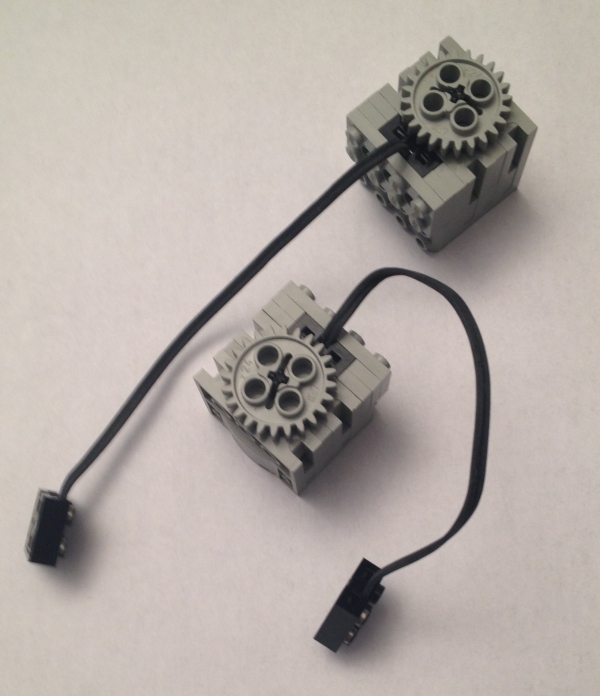
Question #1: Where to start? Well, if we're going to get something to move, we might as well start at the bottom of the "stack". Given that FRC uses all DC motors (steppers and servos are for more precise motion control), we should start there as well. Since we are working with the RasPI, motors need to be smaller. 12VDC motors (without proper power protection) would fry the Pi. Fortunately, I happened to have an old Lego Mindstorm set I…
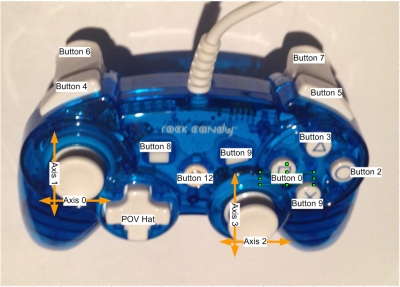
I wanted to include "teleoperation" in the PiBot. That meant that I had to setup a driver station. I needed some type of joystick or gaming console. So, I found a local Game Stop, and bought a refurbished one for about $15. This "Rock Candy" job should do the trick. I know that at some point, I'm going to need to map at least the axes of the joysticks to drive the left and right motors, so I found an…
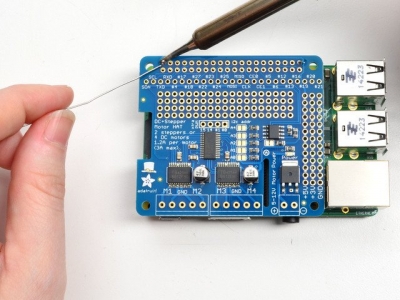
My MotorHAT came in the mail from Adafruit. Always a happy moment when parts come in the mail. First thing I did was open it up, and solder on the headers, just like it says in the docs. (That's a picture of their pretty soldering, not mine). It's pretty easy to do, once you get the hang of it. Once all the soldering iwas done, I needed to wire in one of the motors I had from my old Lego…
Well, all went well with soldering up the MotorHAT. In fact, we downloaded the software from Adafruit, fired it up in Python, and went through a sequence of first moving a single motor, then moving two motors just using SSH and Python locally on the Pi, with the device on the bench. What I needed to do next was find a python program that would initialize a networktables server, and listen for a connection from a client, and print out…



